Wint Aerospace UAV Stack Documentation
The Wint UAV Stack is a comprehensive ground control and flight control solution that enables Operators and Pilots to manage Unmanned Aerial Vehicle (UAV) Operations. It integrates capabilities for controlling UAVs, planning operations/missions, and monitoring the System via a Flight Controller (FC), Ground Control Station (GCS) and Remote Controller (RC) working together.
Key capabilities are listed -
- Flight Stabilization & Control -
- Stabilizing a UAV as it remains airborne.
- Providing varying levels/types of control for the UAV depending on the operation.
- Tuning of Control System parameters.
- Customizing UAV Configuration (such as maximum speed, battery thresholds, maximum altitude etc.)
- Communication & Telemetry Monitoring -
- Maintaining consistency between GCS and UAV state, parameters, configuration etc.
- Preventing invalid states and situations caused by faulty communication.
- Real-time awareness of UAV pose, position, state, errors etc. from GCS.
- Flight Tuning -
- Allowing safe and convenient tuning of Flight Control Parameters.
- Ensuring consistency between GCS and UAV.
- System Setup & Maintenance -
- Preflight checks and calibration to ensure system is properly setup and safe to operate.
System Overview
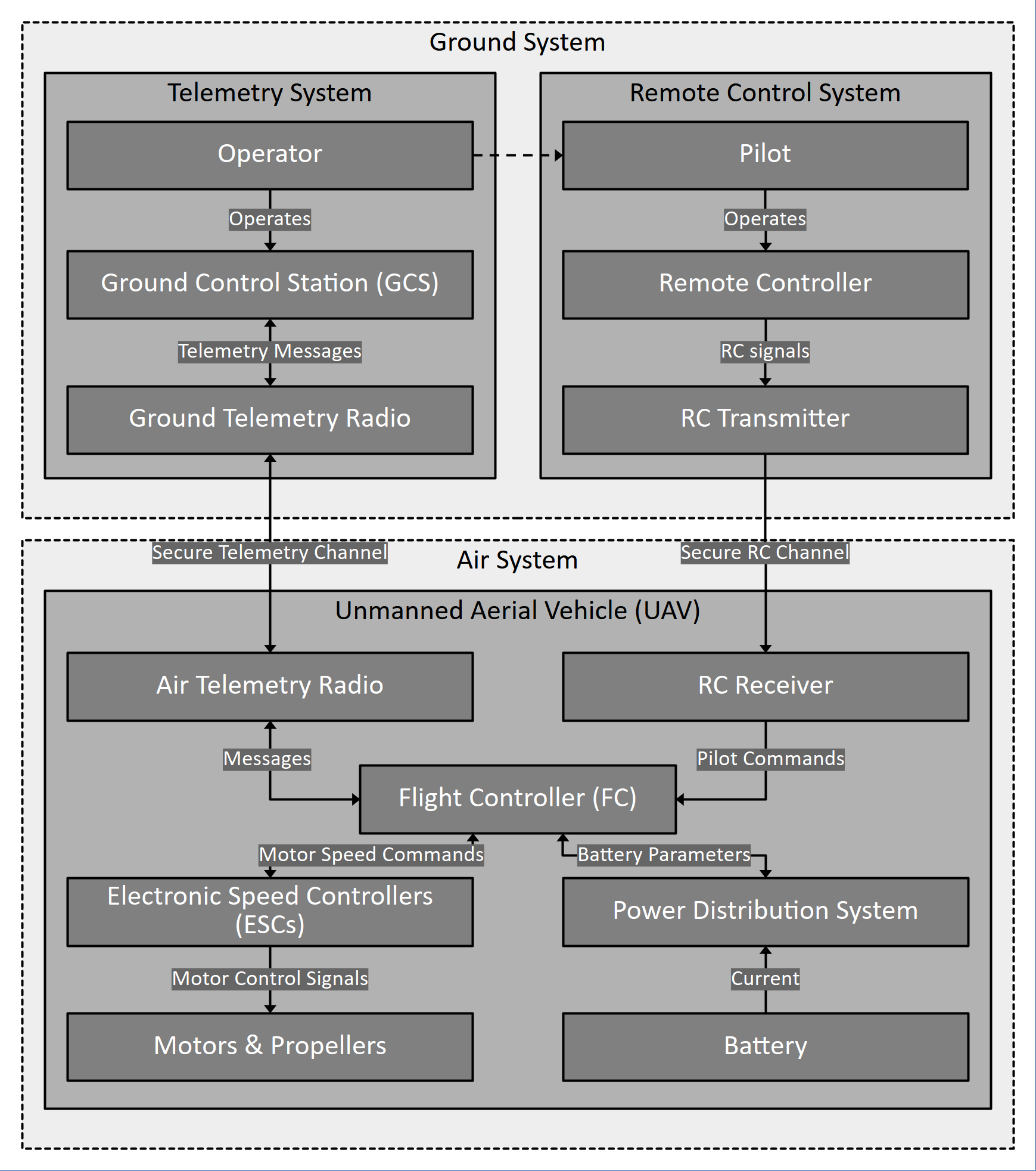
The diagram above shows an abstracted view of the System. It includes the major components and their relations. At the top-level, the System is divided into the Ground System and Air Systems, which contain the remaining sub-components of the system.
Air System
The Air system consists of a UAV, i.e. an aircraft without an onboard human pilot/passenger, capable of remote controlled or autonomous flight.
At the heart of the UAV is the Flight Controller (FC), which is an onboard device consisting of a microcontroller, sensors, blackbox & connectors, responsible for stabilization, control, communication and logging.
Apart from the FC, the UAV consists of the following physical components -
- Airframe: The physical structure of the UAV housing all its components.
- Electronic Speed Controllers (ESC): A device converting speed commands from the FC to motor control signals.
- Propulsion System: The motors, propellers and control surfaces which provide and control lift to the UAV.
- Battery: The power-source for the propulsion system and electronics in the UAV.
- Power Distribution System: The system that distributes the power from the battery amongst the electronics, and passes battery parameters (voltage, current-draw, temperature) to the FC.
- Telemetry Radio: A physical device that allows the UAV to receive and transmit Telemetry data over radio-frequency.
- RC Receiver: A physical device that allows the UAV to receive Pilot commands over radio-frequency.
It also consists of the following software -
- Firmware: The primary software running on the FC that carries out its responsibilities.
- Secure Bootloader: Additional software on the FC (alongside the firmware), responsible for enabling secure firmware updates through wired connection with the GCS.
And the following logical blocks -
- UAV State: A collection of variables which completely describe the UAV's condition (can be used to reason about the UAV's behavior and response to events).
- UAV Configuration: Parameters stored on the FC, customizing the UAV's behavior (e.g. maximum horizontal/vertical speed, maximum altitude, minimum battery etc.).
- Control System Configuration: Parameters stored on the FC, customizing the control system (e.g. PID gains).
Ground System
The Ground System consists of the Telemetry System and Remote Control System. The latter is responsible for immediate, manual control of the UAV while the former is responsible for tuning, configuring the UAV, planning operations and viewing telemetry.
At the heart of the Telemetry System is the Ground Control Station (GCS), the software used to monitor, plan and manage the UAV by communicating with the FC through Telemetry Messages. Apart from the GCS, the Telemetry System consists of -
- Operator: The person operating the GCS; might also be the Pilot.
- GCS Configuration: Parameters customizing the GCS Application's behavior (e.g. log verbosity).
At the heart of the Remote Control System is the Remote Controller (RC), which is the handheld device with joysticks, knobs, switches and sliders that is used to send immediate control signals to the UAV. Apart from the RC, the Remote Control System consists of -
- Pilot: The person operating the RC to control the UAV's movement.
Communication
Communication (primarily between the GCS and FC) occurs through Telemetry Messages, which are structured units of data sent from the UAV to the GCS or vice-versa.
All communication occurring between the GCS and FC is secure with the following characteristics -
- Privacy: Messages are encrypted to prevent unauthorized reading, even if the communication channel is compromised.
- Integrity: Messages are sent with a checksum to ensure that the message sent is the same as the message received.
- Authenticity: Messages are signed with a secure key and sent with a timestamp to prove the sender's identity, as well as prevent replay attacks.
Fundamental Relationships
The system involves a single GCS and a single RC communicating with a single UAV/FC per session.
- GCS FC Communication: Bidirectional messages exchanged continuously to support comprehensive monitoring (telemetry), configuration management, and command/control from the GCS. The FC continuously sends messages to the GCS for real-time situational awareness, while the GCS can send messages anytime for command and control.
- RC FC Communication: Unidirectional signal transmission provides low-latency and reliable control input from the Pilot to the FC; a return path is omitted to minimize complexity and latency for this primary control function.
- Configuration: The UAV Configuration is defined and managed via the GCS (through suitable user-interfaces), but is uploaded to and enforced/executed by the FC (responsible for real-time control). The Control System Configuration is also managed by the GCS.
- Data Synchronization: Mechanisms ensure consistency between GCS-displayed data (Geofence, Mission Plan, UAV Configuration, Control System Configuration) and the active data on the FC. This synchronization is crucial for safety, preventing decisions/actions based on outdated or mismatched information.
Other Concepts
Location/Navigation
- Home Location: A geographic point representing the start and intended safe return location for a flight session.
- Return To Home (RTH): An automated maneuver where the UAV autonomously navigates back to the Home Location (initiated manually by the Operator or automatically as a failsafe).
- Geofence:
- Mission: